Robot Operating System
2000s 斯坦福大学 起源, 2007年 willow garage发起,pcl opencv


有对应依赖的Ubuntu 版本 LTS 选这种
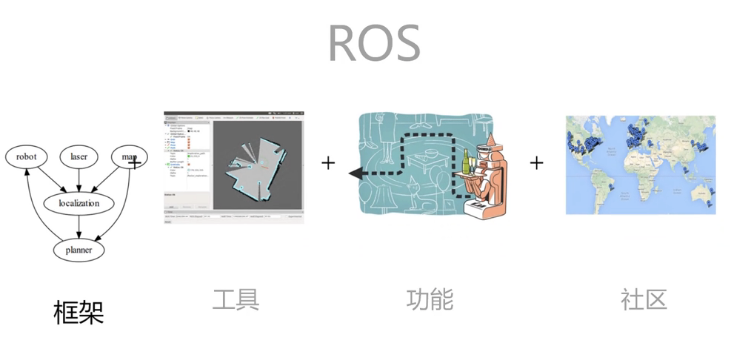
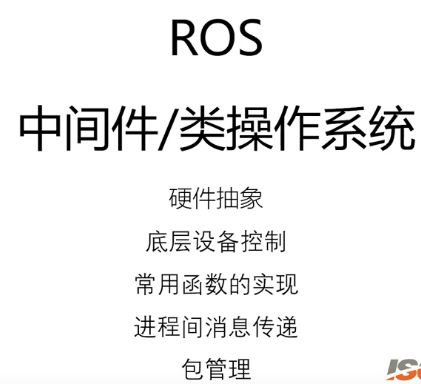
ROS 提供了类似操作系统的功能
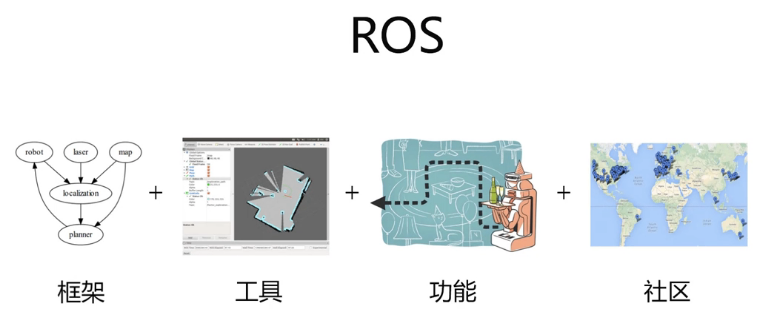
分为这4部分功能。
很多时候说通信,就是指 框架这部分:
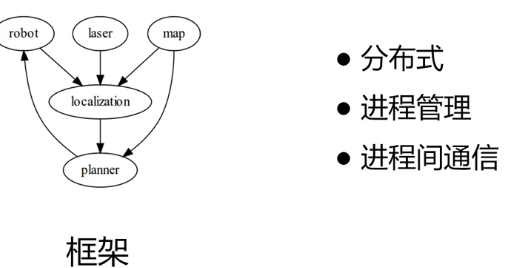
多个进程组合起来,多个node组合起来。 我这个机器人跑起来,会启动10个node. 会有10个进程。
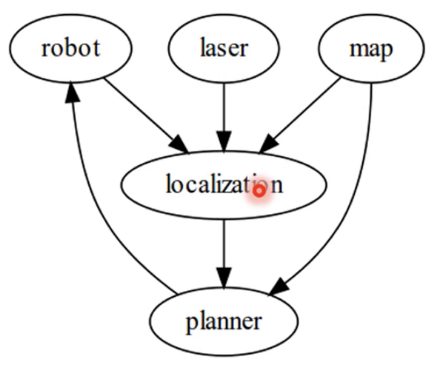
这个有5个node.
分布式:软件复用率高,扩展性好,比如我换了一个laser
Robot Operating System
2000s 斯坦福大学 起源, 2007年 willow garage发起,pcl opencv
有对应依赖的Ubuntu 版本 LTS 选这种
ROS 提供了类似操作系统的功能
分为这4部分功能。
很多时候说通信,就是指 框架这部分:
多个进程组合起来,多个node组合起来。 我这个机器人跑起来,会启动10个node. 会有10个进程。
这个有5个node.
分布式:软件复用率高,扩展性好,比如我换了一个laser
本文链接:https://harry.ren/post/Ros-01.html
-- EOF --
作者
Harry
发表于
2021-03-01 07:19:44
,最后修改于
2021-03-05 15:33:35
Comments